This presentation was the culmination of a hackathon that took place during September 2017 at NUST MISIS in Moscow. The objective was to develop efficient machine vision for driverless cars.
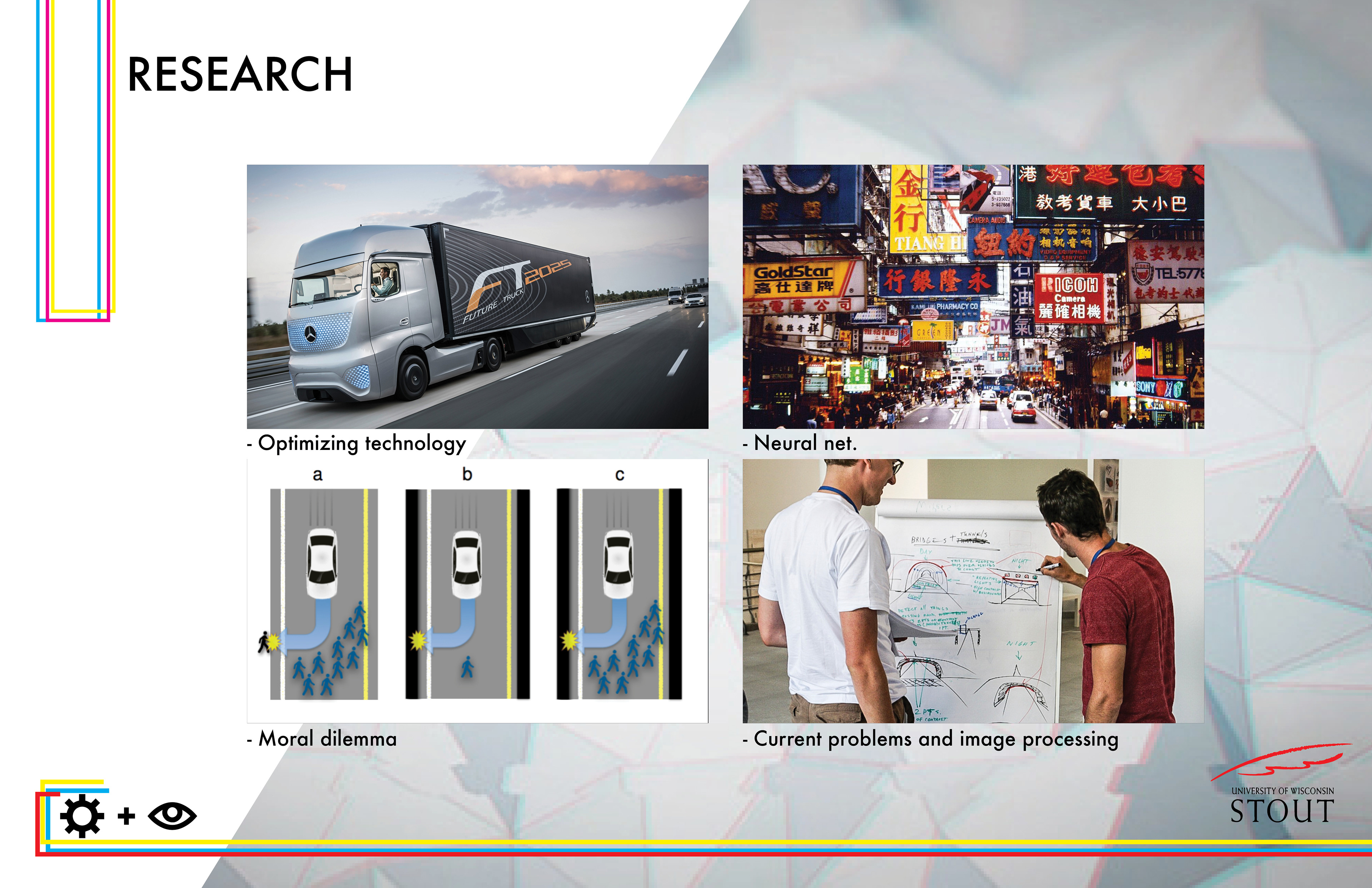
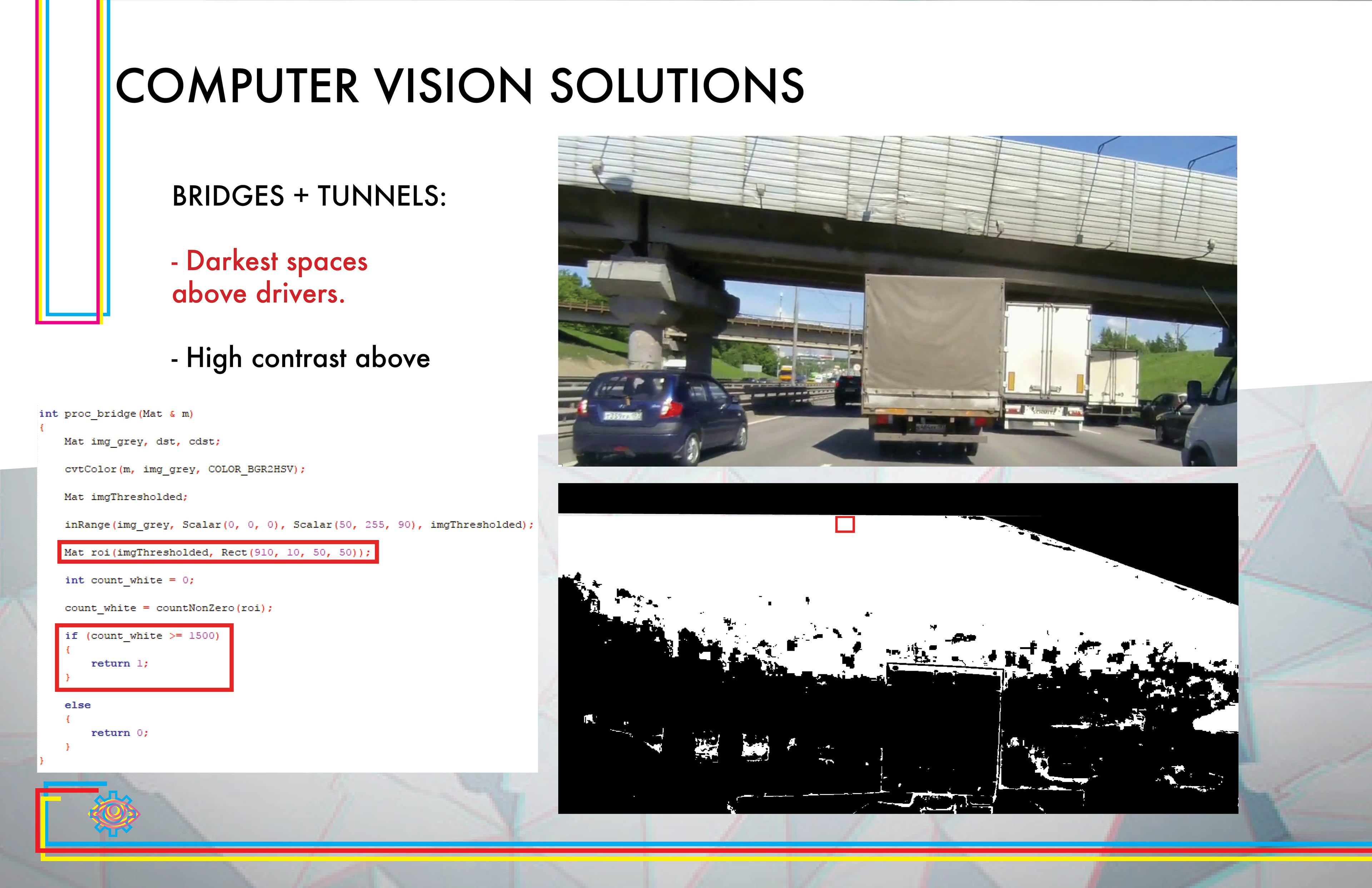
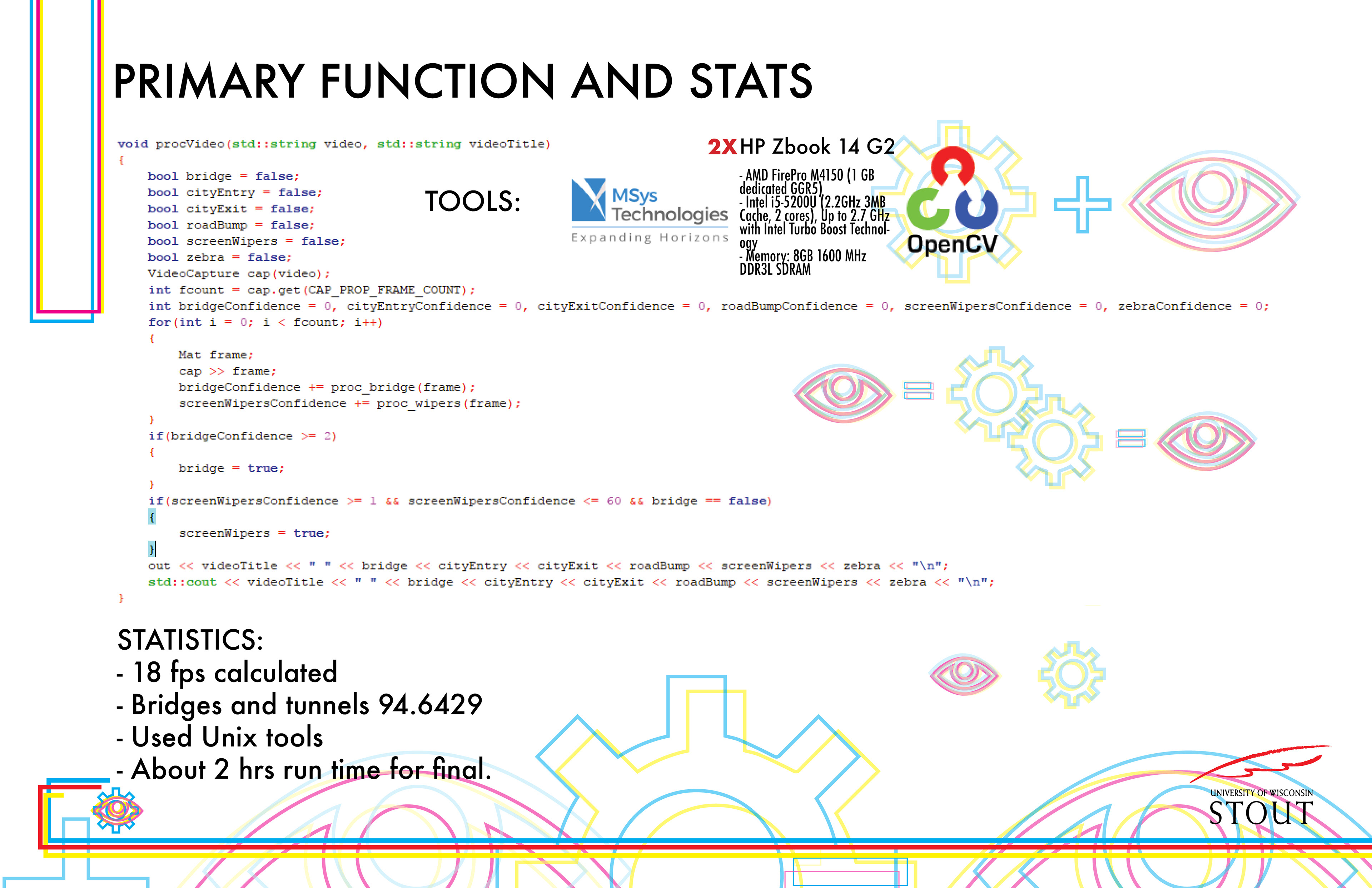
Ideally we would build a neural network to teach computers about reading visuals in order to keep anomalies to a minimum. This system our team programmed is however a fairly reliable way to build the system's level of confidence in the road ahead and can be seen as an asset to a neural network. No neural network was implemented because of computing restrictions put on by the competition.


Additional thank you to AMD for the presentation award and recognition.
Thanks for viewing the presentation!